
|
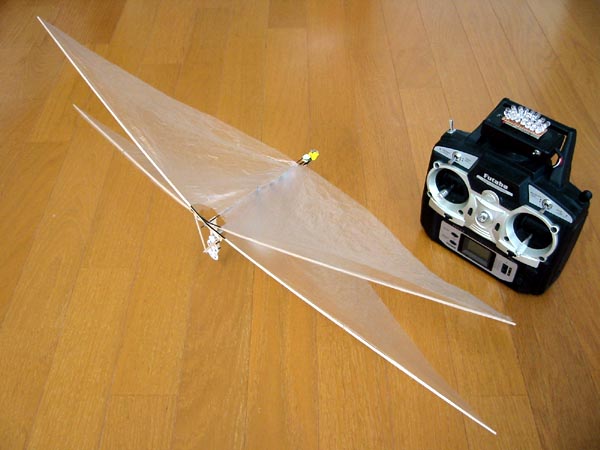
細貝さんの14.8gファンフライ機 (新潟県)
翼幅300mm、全長351mm、全備重量14.8g モータMK07-1.7(12:48ギヤダウン) プロペラ5x3DD 電池50mAh Li-Po スマートサーボ3個 4ch赤外線受信機 スマートサーボのトルクがもう少しあれば反時計回りのトルクロールができるのですが!! フライトムービー <2007/12/5> |




|
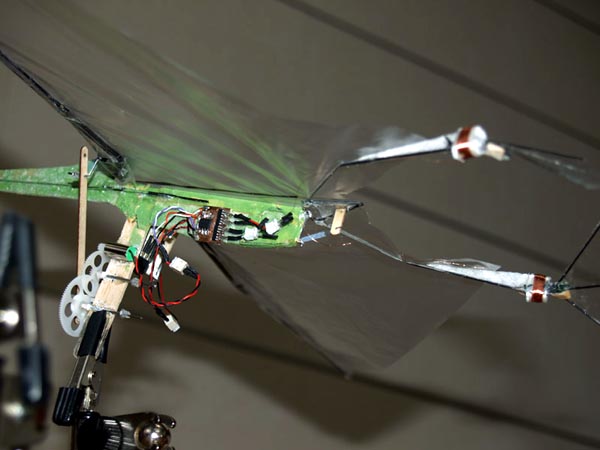
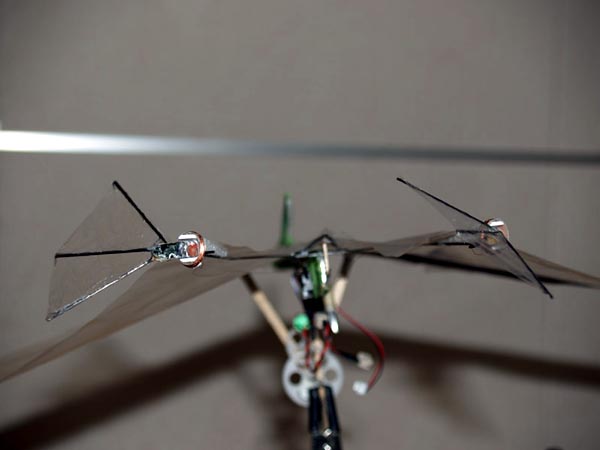
角田さんのプテラノドン (宮城県)
インドアープレーンを作っていると、昔からの夢であった翼竜を作って飛ばしたいとい
う気持ちがむらむらとわき上がってきた。 Indoor Planeの軽量な部品を使い、実際の翼竜の飛行システムを使って作れないかと試行錯誤。翼竜の翼の羽ばたきで、飛行は可能となった。上下のコントロールは足を上下させると可能であるが、左右のコントロールがうまくできない。首を振ると体は傾くが、多少曲がるのみ。左右の足を別々に上下させて、翼の後縁を上下させエレボン様に操作してみた。グライディング時は効果あるが、羽ばたき時は羽ばたきの力に負けてしまい、コントロールできない。 より翼竜に近い形で左右のコントロールができないかと試行錯誤。この機体では、足の 指に膜をつけ逆V尾翼とした(コンピューターミキシングで制御)。アクチュエーターで 上下に動くようにすると重力でどうしても動翼部が下に落ちてしまうので、アクチュエー ターの軸を上下にし、左右に動くようにした。こうすると、磁石やゴムなどを使わなくて も中立が保てる。動翼部をアクチュエータの軸に対して45度程度ひねって付けることで、 左右上下にコントロールできるように作成した。左右に曲がるときは左右の足を同じ方向 に曲げる。上昇時は両足を外側に開き、下降時は内側に閉じる。足が大きすぎることを除 けば、形はほぼプテラノドンとなったが、飛行システムは、やっぱり本物とは異なってい る。 現在、さらに本物のプテラノドンの飛行に近いものを試行錯誤中。その他の作品はこちらに掲載しています。 <2007/6/2> |

|
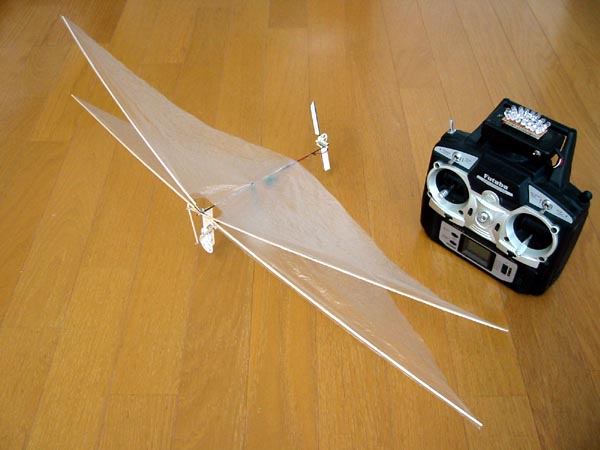
高橋さんの無尾翼型羽ばたき機2種 (千葉県)
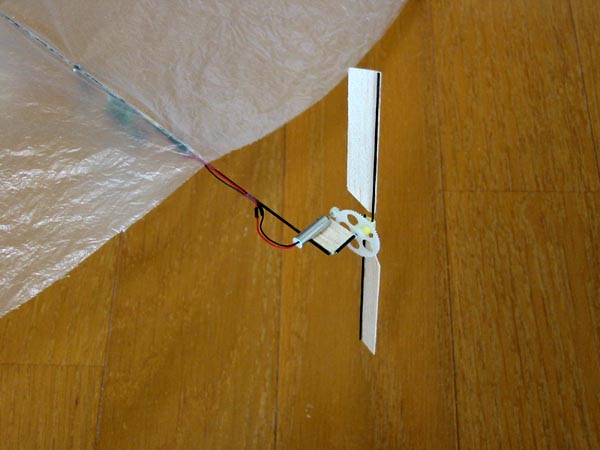
実機・模型を問わずたいていの飛行機には、飛行中の姿勢安定や操縦のための尾翼が付いていますが、今回は尾翼を持たないタイプの羽ばたき機を製作してみましたので紹介させていただきます。 最初の機体は、主翼スパン約70センチ、小生がよく作る4枚羽根タイプですが、電池の搭載場所などをくふうして重心位置を調整することにより、尾翼を全くもたずに、羽ばたき翼だけで飛行できるようになっています。ただそれだけでは左右のコントロールが効かないため、通常のラダーの代わりに、テールローターというか、サイドスラスターとしてはたらくプロペラを尾部に付けてあります。 羽ばたき機は低速で飛行するためか通常型のラダーの効きがあまり良くないのですが、テールローターの効きはバツグンで、比較的大きな機体にもかかわらず、狭いリビングルームでの旋回飛行を難なくこなします。 羽ばたき推進用のメインモーターはMK06-4.5。減速比45:1。左右のコントロール用にMK04-40モーターを6.7:1に減速して、直径12センチのテールローターを駆動しています。受信機はIRX2Nを無改造で使用。30mAhLi-po電池を含む全備重量は8.4グラムです。 次の機体も、同じ70センチサイズの4枚羽根タイプですが、こちらはさらに進んで、機体後部に操縦用の空力デバイスをいっさい持たない完全無尾翼機です。 左右のコントロールは、尾翼の変わりに尾部に設置したファルコンサーボで、左右の主翼につないだ テンションコードを引っ張ることにより行います(コードを強く引っ張った方に曲がります)。こちらもメインモーターはMK06-4.5。ただし減速比は100:1まで上げてあります。受信機は、IRXA301を ベースにサーボ用のプログラムを書き込んで使用。30mAhLi-po電池を含む全備重量は最初の機体と同じく8.4グラムです。 こちらの機体は、予備テストの感触では、テールローター機ほどの小回りは利かないようですが、今度の飛行会に持ち込んで、テスト飛行を行ってみる予定です。 <2007/1/6> |